Overview - Turtle Robot Project Page - Project Zenith
This robot is a small 2 wheeled / caster platform. With a built in raspberry pi to guide the machine's movement through the use of python coding.Members: Ronald & Jesus
Current Project Status: "In Progress"
Update with date driven entries... as you enter entries, keep the latest at the top. Also, when ever you post an update here, create a new Blog entry as well...3/9/2018 - Finished gluing casters and tested movement of turtle bot. Realized one of the wheels is loose and needs to be tightened.
3/8/2018 - Gluing the caster parts together while updating the blog and page template.
3/1/2018 - Finished Presentation for project, while putting 3D printed parts together.
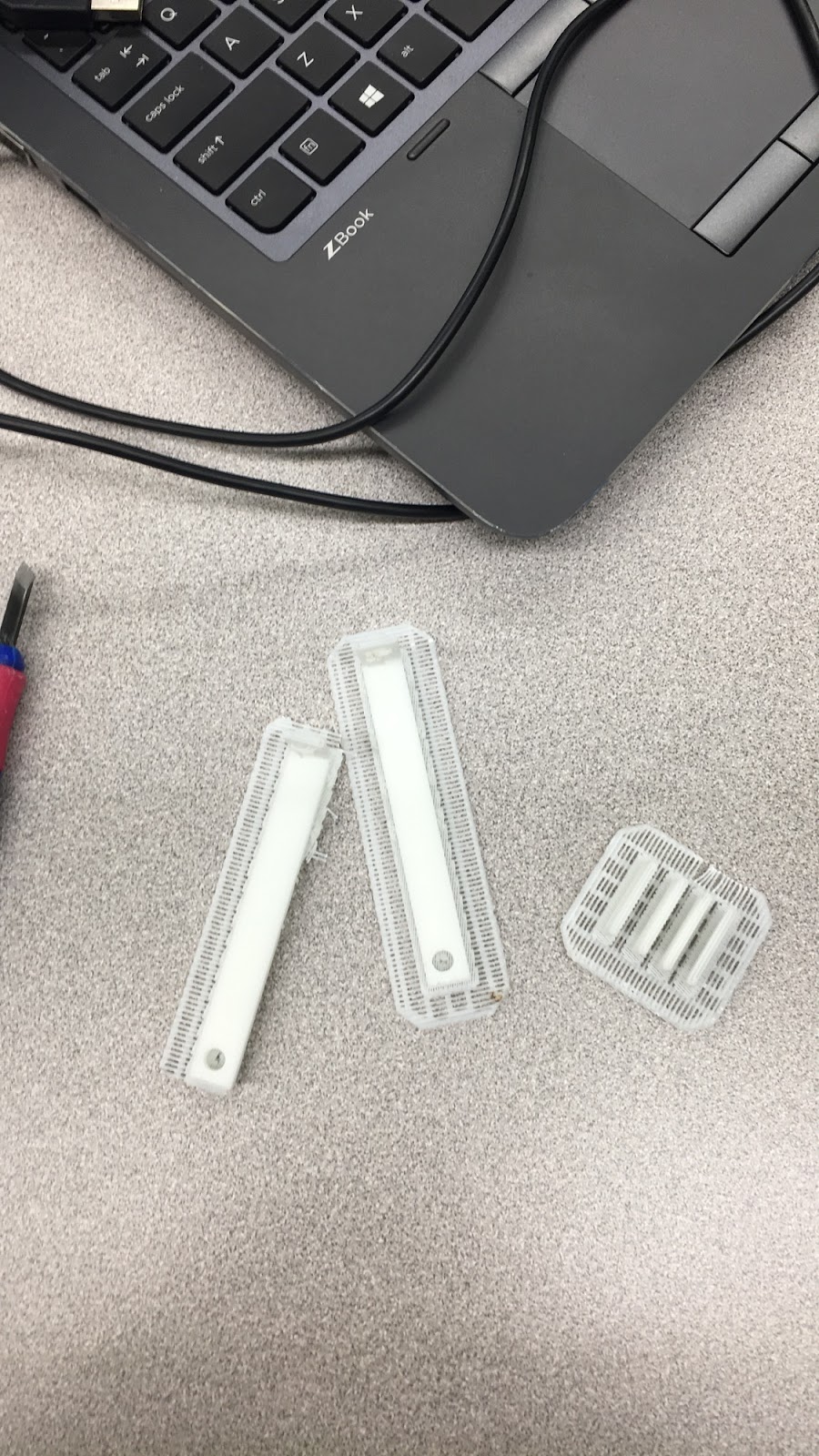
2/28/2018 - Started on presentation for the project, also breaking apart 3D printed part.
2/27/2018 - Started printing out parts
2/26/2018 - Starting on presentation slides for Friday
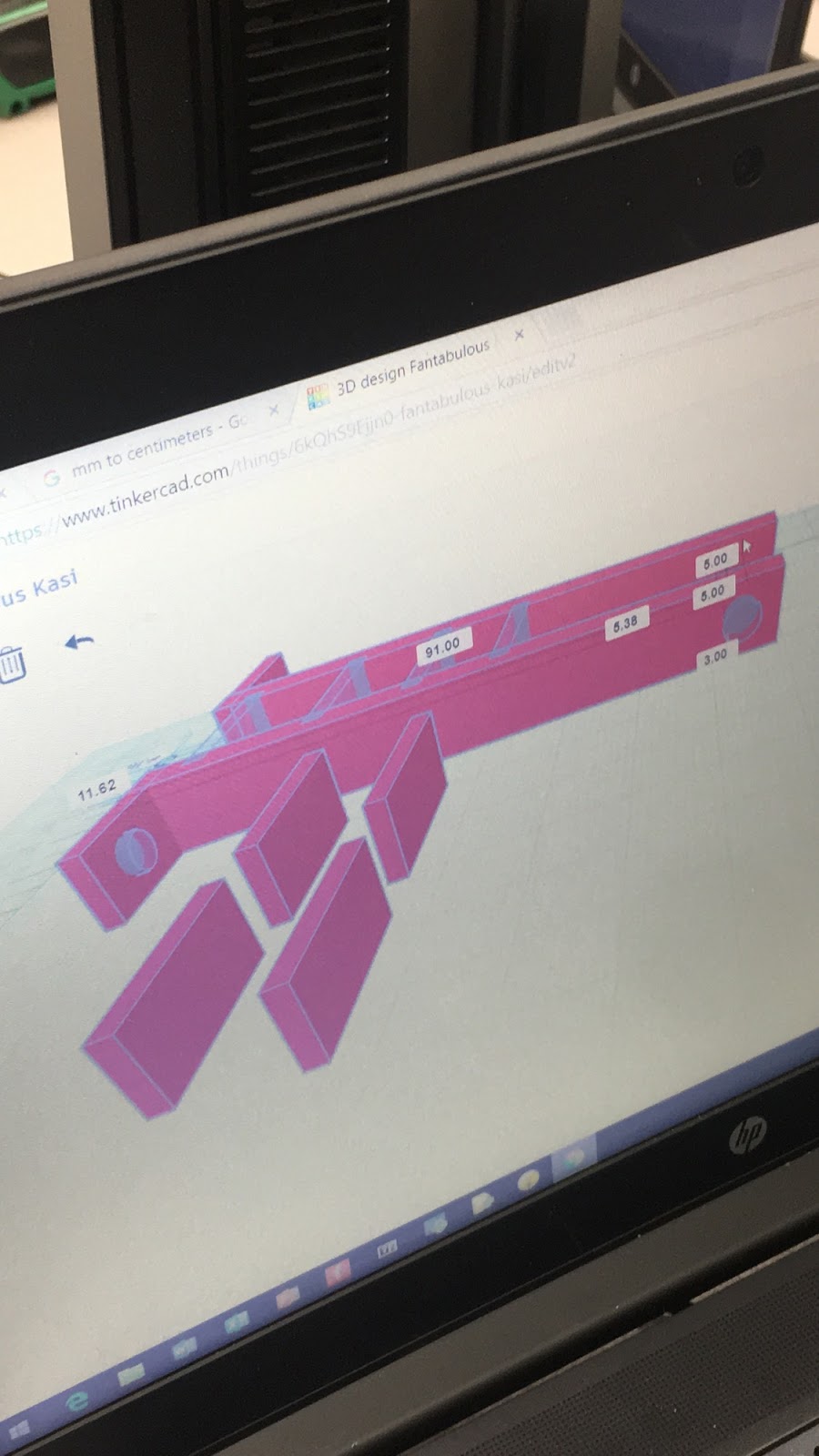
2/16/2018 - Further progress on our 3D printed part (measurements, creating part and printing)
2/15/2018 - Starting Step 4 (making our 3D printed parts)
2/14/2018 - Major blog update
-Contribution:
Ronald: Updates blog
Jesus: Suggested Ideas, Asked advice
2/13/2018 - Completed step 3
2/9/2018 - Updating blog, next time we work on the project will be connecting the motors with our platform (through the use of zip ties).
2/8/2018 - Finalized Step 2
2/7/2018 - Drilled more holes
2/6/2018 - Made holes in our platforms and started zip-tying the motors to the base of our robot.
1/22/2018 - Not done much, still getting used to the project
1/19/2018 - Kicked off this project. Initial platform was from a Turtle bot platform with neato motors and wheels and controlled by an Arduino
Next Steps:
List all the current steps in order of priority. Mark "Pending", "In Progress", "Road Block", "Done"- Check motors "Done"
- Drill holes into platform "Done"
- Connectors motors to the platform "Done"

- 3D print caster parts "Done"
- Glue wood block to casters "Done"
- Glue casters "Done"
- Glue hardware to platform "In Progress"
- Connect motors from power to ground "Pending"
- Code the turtle bot's system "Pending"
- Synchronize motors and platform to work together "Pending"
- Finalize (check for any minor/major errors) "Pending"
Mechanical Configuration:
This section describes the Physical / Mechanical configuration of the platform... How does it work from a hardware point of view.- The robot will have two wheels and a caster strapped to a platform in the bottom, while the sensors such as raspberry pi, wires breadboards, etc. Will be on top of the platform
-Caster will have 3D printed models to hold it together with the platform.
Sensor Package:
This section describes the Sensor configuration of the platform... What sensors are used and how do they work. List them.
List:
1. Rasberry Pi
2. Wires
3. Motors
4. Breadboard
Data Sheets and Resource Links:
Here you will find links to any data sheets for components used on this robot platform. Also links to any Instructables or YouTube sitesSource Code:
Please describe any source code and link to it. Best to have a GitHub account and host your code there.<description and link>
No comments:
Post a Comment